На основі методу глибинного навчання — різновиду штучного інтелекту — дослідники створили лазерний пристрій, який у реальному часі здатний бачити предмети, розташовані за рогом. За допомогою такої системи самокеровані автомобілі, наприклад, могли б помічати перешкоди довкола припаркованих авто чи завантажених перехресть, а супутники та космічні апарати проводили б зйомку всередині печер на астероїдах.

“Якщо порівнювати з іншими підходами, то наша знімальна система має виняткову операційну швидкість та роздільну якість зображення, — стверджує головний інженер проєкту Крістоф Метцлер зі Стенфордського університету. — З її допомогою можна створити застосунки, які дозволять, наприклад, прочитати номерний знак автомобіля, що їде за рогом”.
Стаття з описом пристрою вийшла в Optica, журналі Американського оптичного товариства. Метцлер та його колеги з Прінстонського університету, Південного методистського університету та Університету Райса повідомляють, що нова система здатна розрізняти субміліметрові деталі, розташовані на відстані 1 метр за рогом від камери. У цьому експерименті систему налаштували так, щоб отримувати дуже точні зображення маленьких предметів, але її можна поєднати з іншими пристроями задля реконструкції вигляду цілої кімнати.
“Зйомка об’єктів, які перебувають не в полі зору, є дуже актуальною проблемою у медицині, навігації та військовій справі. Наше дослідження робить важливий крок у цій галузі”, — каже співавтор дослідження Фелікс Гайд з Прінстонського університету.
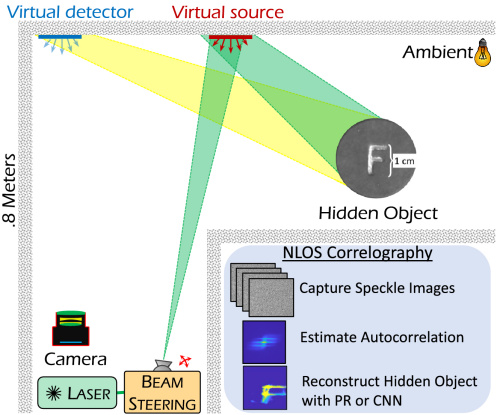
Систему науковці розробили на основі комерційно доступних сенсорів та потужного, але вже стандартного лазерного джерела, яке дещо схоже на звичайну лазерну указку. Лазерний промінь відбивається від видимої поверхні, падає на прихований від зору об’єкт, відбивається назад на стіну і потрапляє на сенсор, де утворює складний інтерференційний рисунок — так званий спекл, який закодовує форму невидимого об’єкта.
Основна складність в тому, як розкодувати цю форму назад зі спекла. Річ у тім, що спекл генерує дуже багато шуму, тож звичайні алгоритми з цим завданням не можуть впоратися. Щоб розв’язати проблему, дослідники скористалися методикою глибинного навчання.
“Порівняно з іншими підходами, які дозволяють отримати зображення прихованих об’єктів, наш алгоритм набагато краще дає собі раду з шумом і може працювати зі значно коротшими експозиційними проміжками", — розповідає співавтор дослідження Прасанна Ранґараджан з Південного методистського університету.
За допомогою цієї методики дослідники отримали дуже точне зображення пробних літер та цифр заввишки 1 см, які розташували за кутом на відстані 1 метра від знімальної апаратури. Одна секунда експозиції дозволила реконструювати їхні деталі з точністю до 300 мікрон.
Дослідження проводиться у рамках проєкту “Революційне підвищення видимості за допомогою використання активних світлових полів” (REVEAL), яке фінансує Агентство перспективних оборонних розробок США (DARPA).
Deep learning enables real-time imaging around corners
ScienceDaily, 16/01/2020
Christopher A. Metzler, Felix Heide, Prasana Rangarajan, Muralidhar Madabhushi Balaji, Aparna Viswanath, Ashok Veeraraghavan, and Richard G. Baraniuk
Deep-inverse correlography: towards real-time high-resolution non-line-of-sight imaging
Optica Vol. 7, Issue 1, pp. 63-71 (2020)
Зреферував Є. Л.