Науковці розробили робота, що здатен до самосприйняття. Адаптивна машина через камери спостерігала за собою, і на підставі цього самостійно розробила модель власної форми та свого руху. Так виробилася проста форма самооцінки, що помагала роботові вирішувати завдання. Здатність машин до самопізнання може посприяти розвитку автономних і самосвідомих роботів, розповіли науковці в журналі “Science Robotics”.
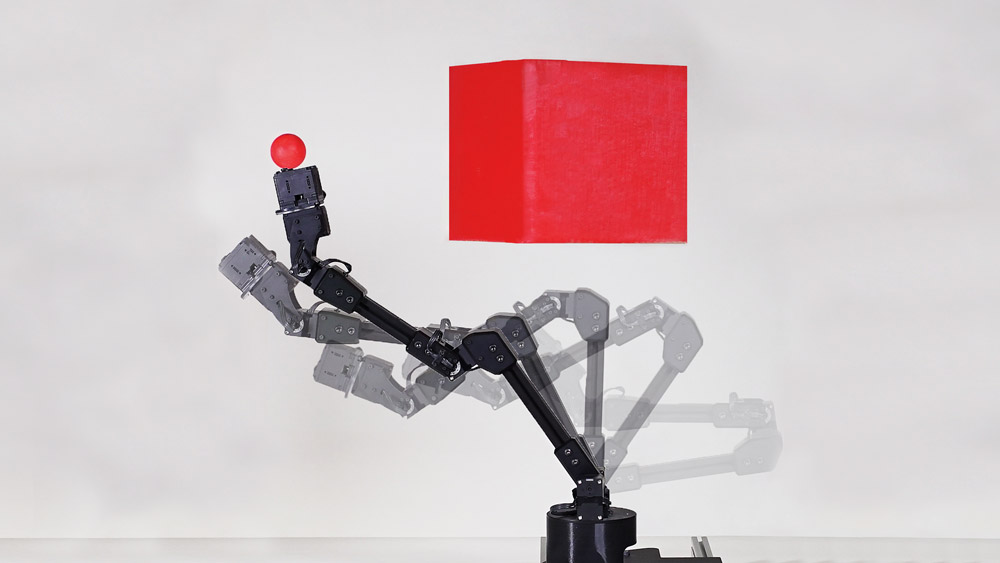
Ця роботизована рука здатна усвідомлювати власну форму. Тож їй вдалося торкнутися м’яча, але не кубика.
Зображення: Jane Nisselson and Yinuo Qin / Columbia Engineering.
Сприйняття власного тіла не завжди реалістичне на 100%. Проте це визначальна інформація для того, щоб орієнтуватися у світі. Коли людина біжить або кидає м’яч, її мозок заздалегідь планує, як тіло змінюватиметься за певного руху, аби, наприклад, не спіткнутися. Люди змалку поступово пізнають своє тіло, проте роботи досі більше зосереджувалися на сприйнятті світу навколо себе.
Команда на чолі з Бояан Чен (Boyuan Chen) з Колумбійського університету в Нью-Йорку надала роботові можливість розробити своєрідне усвідомлення власного тіла. “Люди наділені виразною самосвідомістю, – сказав Чен. – Ми можемо заплющити очі та уявити, як рухається наше тіло, коли, наприклад, простягаємо руки або робимо крок назад. Десь у нашому мозку сидить ця самосвідомість – модель, що інформує нас про те, який простір ми займаємо та як він змінюється, коли ми рухаємося”.
Метою науковців було впровадити таку самосвідомість у роботизовану руку. Для цього її підключили до п’яти камер, розташованих навколо, через які робот міг спостерігати за собою. Впродовж загалом трьох годин робот здійснював випадкові рухи, а потім проаналізував форму свого тіла та його здатність до руху. Так він зібрав майже вісім тисяч пунктів інформації, через які його нервова мережа змогла вивчити взаємозв’язок між моторикою руки та простором, яку вона займає після кожного руху.
“Нам справді було цікаво, як робот себе уявляє, – сказав провідний автор Год Ліпсон (Hod Lipson) із Колумбійського університету. – Але не можна просто заглянути в нейронну мережу, оскільки це чорний ящик”. Але після кількох спроб науковцям усе ж вдалося візуалізувати самосприйняття робота-руки. “Це своєрідна мерехтлива хмарка, що ніби огортала тривимірне тіло робота, – пояснив Ліпсон. – Коли робот рухався, з ним м’яко пересувалася і хмарка”. Зі слів учених, точність цієї моделі була в межах одного процента робочого діапазону.
Яку користь приносить така форма самоусвідомлення та самооцінки, демонструє інший експеримент. У ньому робот мав використати свою щойно набуту знатність самосприйняття, щоби доторкнутися до м’яча, що котився, – спочатку абияк, а потім кінцем руки. Машина була здатна здійснити завдання з точністю до двох сантиметрів, а обчислення цього тривали близько п’яти секунд.
У третьому завданні роботові на шляху до м’ячика поставили кубик, до котрого не можна було торкатися. “Загалом квота успіху нашого робота у цих завданнях становила 97%”, – повідомили науковці. Це може свідчити про те, що здатність до самооцінки посилює точність рухів робота.
У результатах експериментів Ґод Ліпсон вбачає важливий крок на шляху до автономних машин. “Самомоделювання – це примітивна форма самосвідомості, – пояснив учений. – Коли машина, тварина або людина має точну модель самої себе, то краще функціонує у світі, приймає кращі рішення, тож наділена еволюційними перевагами”.
Завдяки точному сприйняттю власного тіла в майбутньому роботи можуть заощадити час інженерів. Так, вони могли б, наприклад, самостійно помічати пошкодження або зношення. Зі слів учених, стати самостійнішим – це важливий крок для систем, що з часом будуть автономними. Так промисловий робот міг би визначити, яка деталь неправильно працює, й або самостійно усунути неполадку, або покликати допомогу.
Науковці знають, що вища автономія та самосвідомість роботів отримує контраверсійні оцінки в публічних дискусіях, вона може також приховувати ризики. Зі слів Ліпсона, самосприйняття, яке наразі вдалося розвинути, можна назвати “тривіальним, порівняно з людським, але з чогось потрібно почати. Ми повинні працювати повільно та обережно, мінімізуючи ризики та здобуваючи переваги”.
Jan Fleischer
Science Robotics, 2022; doi: 10.1126/scirobotics.abn1944.
Columbia University School of Engineering and Applied Science, 15/07/2022
Зреферувала С.К.
21.07.2022